Summary
Download the full whitepaper...
Building Control Systems Drift and MPC Isn’t Enough
Even the most advanced building control systems face the same reality: entropy causes performance to decay over time.
Sensors drift, equipment degrades, conditions change, and most control strategies struggle to keep up.
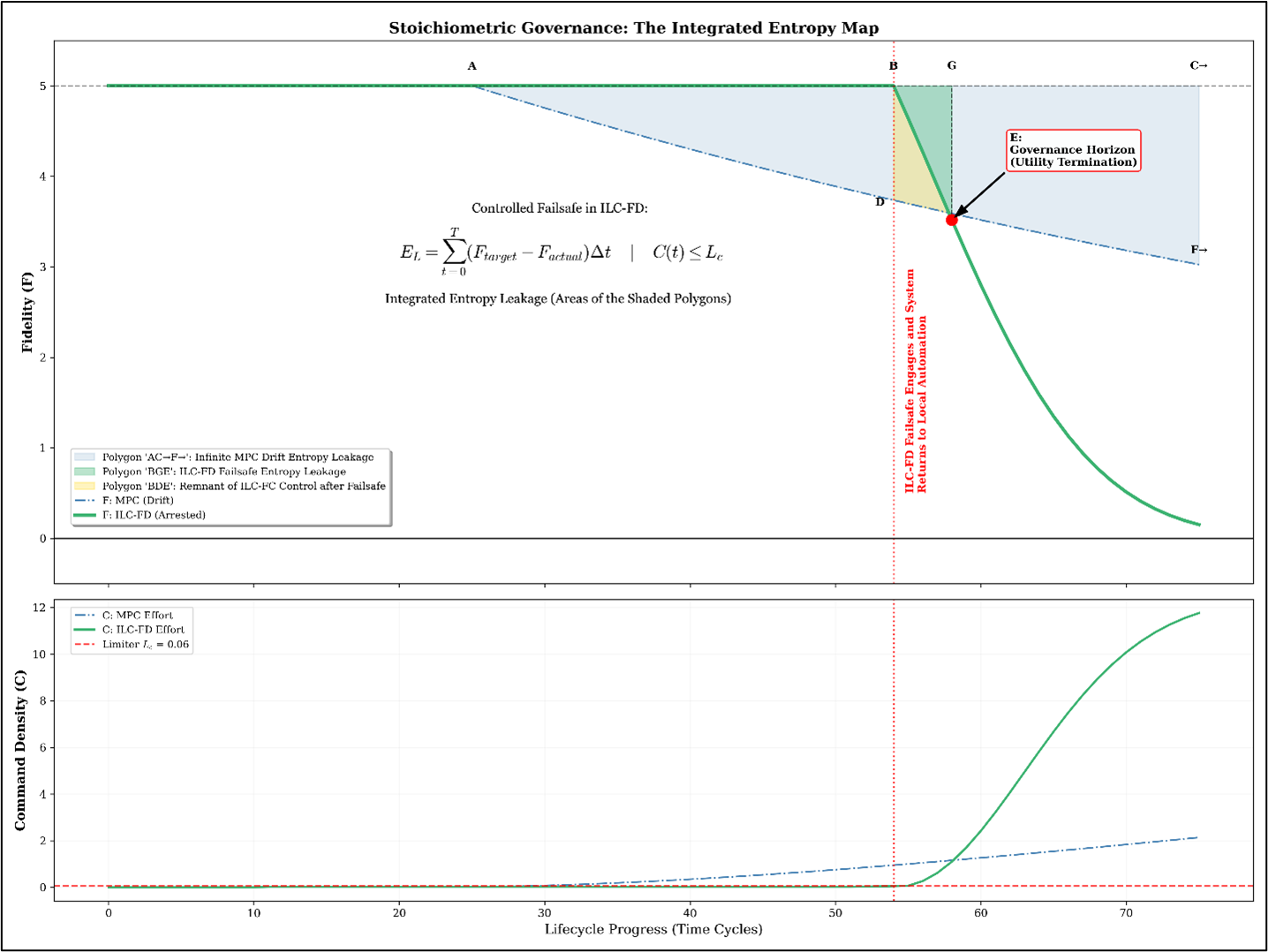
The Problem with Traditional MPC
Model Predictive Control (MPC) is widely used because it’s precise and model-driven, but it has a limitation:
- It reacts within a fixed model
- It doesn’t adapt its position, only its output
- As real-world conditions drift, MPC loses alignment
This results in more corrections, more energy, and ultimately performance drift.
Why ILC-FD Changes the Game
Iterative Learning Control - Frequency Domain (ILC-FD) is fundamentally different:
- It learns from past behavior over time
- It adapts both position and response, not just output
- It actively tracks and intercepts system drift before it compounds
Instead of reacting to entropy, ILC-FD moves with it, continuously repositioning control to stay aligned with reality.
The Metric That Matters
Control effectiveness comes down to one thing:
Can your system correct faster than it decays?
- MPC: Holds the line… until it can’t
- ILC-FD: Continuously repositions to extend performance
What This Means for Building Owners
- Efficiency isn’t static, it degrades according to the law of entropy
- MPC alone will eventually lose the fight against entropy
- ILC-FD extends system performance by delaying and reshaping decay
You cannot win against the natural trend toward entropy, but you can use a control strategy with a natural entropy failsafe.
This is what we are developing at Facil.AI.
"...prioritizes the integrity of the system concerned over the continued operation of a once functioning control model that has since failed." -- Paul Campbell